 コバヤロボコム夏休みスペシャル
コバヤロボコム夏休みスペシャル| 取材協力:AI・2足歩行ロボット研究家:山口博士 |
Copyright 2000 kobaya robocom  |
2足歩行ロボットとは
ロボットはその使用目的によってさまざまな形態があります。
蛇や犬など動物のフォルムを模倣したものや
人間の腕を模倣した産業用アームロボットなどです。
2足歩行ロボットは人間の足の動きを模倣したロボットです。
21世紀には2足歩行ロボットが街中で活躍するのではないかといわれています。
しかし、2足歩行ロボットをいざ実現しようとすると
なかなかむずかしいことに気づきます。
バランスをうまくとらないと、ロボットがすぐバタンと倒れてしまうからです。
ただ、単に足を左右交互に出せばよいというものではありません。
そこでロボコム君は2足歩行ロボットのしくみを勉強するために
静岡で2足歩行ロボットの研究をされている山口博士の研究所を訪ねました。
山口博士は30センチほどの小さな2足歩行ロボットを開発されています。
ロボコム君は2足歩行のなぞについて博士に質問します。
 (ロボコム君)このロボットのスペックについて教えてください。
(ロボコム君)このロボットのスペックについて教えてください。 (山口博士) 身長33cm、重量は670g、です。今は電源を外部から供給し、デスクトップパソコンで制御していますが、最終的にはバッテリーとマイコンを搭載した一体型にします。そのときは重量が1Kg位になると思います。
(山口博士) 身長33cm、重量は670g、です。今は電源を外部から供給し、デスクトップパソコンで制御していますが、最終的にはバッテリーとマイコンを搭載した一体型にします。そのときは重量が1Kg位になると思います。ボディはアルミ製で、磨耗部分は真鍮でできています。
消費電力は歩行時で約5w、歩行速度は0(足踏み状態)~12cm/Secです。
このロボットの特徴は4個のサーボで重心制御、前進、後退、左右回転、足踏みなどを実現している点で、この数のサーボで以上の動作を実現した二足歩行ロボットはこれが最初だと思います。
重量と組み込みスペースの厳しい小型ロボットならではの苦労といったところでしょうか。
製作は99年の8月頃に始めました。現段階でもパソコン制御で一応、歩行できますが今後はマイコンとバッテリーを内蔵し、重心制御ももう少し安定なものにした、完全一体型の完成を目指します。
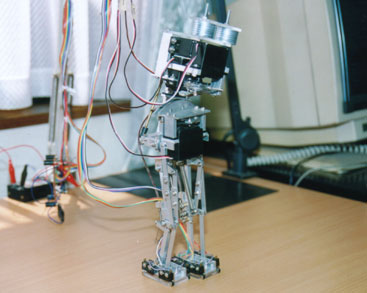 このロボットはどのようにして関節を曲げることができるのですか?アクチュエータはラジコン用のサーボを使用しています。
このロボットはどのようにして関節を曲げることができるのですか?アクチュエータはラジコン用のサーボを使用しています。両足の上げ下げはロボットの一番上、前側に取り付けられているサーボからワイヤーで膝部レバーに力を伝達しています。
このサーボが中央位置から右に回転すると左足が上がり、左に回転すると右足が上がる構造になっています。
更に足を前後に動かすためのサーボもあります。駆動はカム機構で実現していてサーボはお腹の位置にあります。
細かな関節機構を説明するのは難しいのですが、大まかな動きとしては、足を上下に動かすと、股関節、膝関節、足首が連動して曲がり、足を前後に動かすと股関節と足首が連動して曲がる構造になっています。
それぞれの関節の自由度は1です。
この2足歩行ロボットは歩行時どうやって バランスをとるのでしょうか?他の二足歩行ロボットでは足首、股関節を曲げ体全体を移動し重心制御を行うものが多いのですが、このロボットは腰を曲げて上半身の重心移動により前後左右のバランスをとります。例えば、右足接地、左足上げの状態では上半身を右に傾け、重心を右に移動します。
また足裏に片足あたり4個の接地センサがありバランスの崩れを補正します。
その他、足上げや足振り時に、股関節、膝関節、足首が曲がりますが、どの様な状態でも常に足裏は地面に対しほぼ平行、厳密にいえば
かかとが僅かに下がった状態になるようにしてあります。
足裏の角度は足が地面に着地する際、ショックを吸収したり
その後の安定を確保する際、非常に重要な意味をもちます。
このロボットを作るとき苦労した点はどこですか?やはり如何にしてバランスを保つかという部分です。写真のロボットは6号機ですが、1~6号機までの機構上の変更点は全て重心制御がらみです。
また、関節部に少しでもブレやガタがあるとバランス制御が困難になるため、如何に精度よく作るかというのも苦労した点です。
その他、ロボットのサイズが小さいため、如何に少ないサーボで実現するか、サーボ類をどのように組み込むかなど、機構設計にもかなりの時間がかかりました。
2足歩行にもバランスのとり方にいろいろ種類 があるようですが、どのようなものがあるのでしょうか?先ず重心制御の方法ですが、横方向の重心制御は前の話にもあったように足首と股関節を利用し体全体を横に移動する方法と、腰を横に曲げ上半身を傾けることで重心の横移動をする方法とがあります。前後方向も横方向と基本的に同じですが、歩く速度をかえて進行方向の
倒れ込みモメントとのバランスもとります。
また、重心移動の方法で歩き方を分類すると、静歩行と動歩行があります。
静歩行とは常に足接地面内に重心がある状態で、しのび足がこれに相当します。
一方、動歩行は重心が足接地面外にあるような歩き方で、人間が普通に歩いている状態がこれにあたります。
またバランスをとるための必要不可欠な要素として状態検知用のセンサがあります。
実際に使用されるものとして、傾センサ(ジャイロ等)、加速度センサ、力センサなどがありますが、本、二足歩行ロボットでは現在のところ力センサの一種といえる接地センサのみを使用しています。
2足歩行ロボットの制御のむずかしい点はどこでしょうか?如何にしてある瞬間の重心位置を正確に算出または想定するかということとその重心位置に対応した足の繰り出し位置を如何に正確に早く制御するかということに集約されます。前者はセンサの種類、精度、計算方法の問題ですし、後者はサーボや機構上の精度と制御速度の問題です。あと全体を統合する力学モデルも必要なんですが
重心制御はそれらが絡み合ったものです。
それぞれ非常に難易度の高い問題ですが、これら全ての項目を解決しなければスムーズな歩行は実現しません。
しかもロボットの身長が低くなればなるほど重心制御は難しくなりますので
身長約30cmの小型二足歩行ロボットの実現は人サイズのホンダのヒューマノイドロボットよりもさらに難しい開発なのかもしれません。
2足歩行ロボットの開発のきっかけはなんですか?もう10年以上人工知能の研究(趣味レベル)をしているのですが、なかなか進展せず混沌とした状態となっていたとき、何かの雑誌で二足歩行ロボットの記事を見つけ、これなら簡単にできそうだと思ったのが苦労の始まりでした・・そんな簡単なもんじゃないことを思い知らされました。
将来このロボットに何をさせたいですか?人間サイズならいろいろと実用的な応用が考えられますがこのサイズとなるとかなり限られてしまいます。
例えば、無線操縦で柔道の試合、ロボット身長別競歩、
踊らせるとか・・・・どれも大したことありませんね。
逆に大勢の方からいろいろアイディアを頂ければありがたいのですが。
別の考え方をすれば、小型ロボットなら手軽に低コストでいろいろな試行評価ができます。しかもバランス制御は人サイズよりむしろ難しいくらいなのでこの開発によって、人サイズロボットの歩行アルゴリズムを別の角度から支援するようなユニークな知見が得られるような気がします。
どうもありがとうございました。